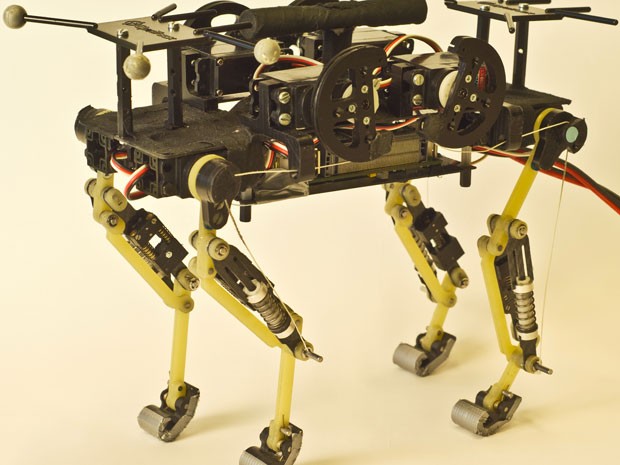
Desenvolvido pelo laboratório de biorrobótica da Escola Politécnica Federal de Lausanne, na Suíça, o modelo pesa menos de 30 quilos, é feito com material considerado barato e de fácil obtenção e foi apelidado de “filhote de guepardo”.
Para garantir estabilidade durante a corrida, os pesquisadores analisaram e simularam os movimentos de felinos reais ao montar a estrutura do robô. A quantidade e as proporções dos segmentos de cada perna são idênticas às dos animais. Molas e pequenos motores que convertem energia em movimento foram usados para imitar tendões e músculos.
"Essa morfologia dá ao robô as propriedades mecânicas que beneficiam os gatos, o que significa habilidade para corrida e a elasticidade nos pontos certos, garantindo estabilidade. O robô é, por isso, naturalmente mais autônomo", explica Alexander Sprowitz, um dos cientistas que ajudou a criar o projeto, em entrevista ao site da universidade.
A proposta dos pesquisadores é utilizar o protótipo, apresentado no "International Journal of Robotics Research", para aperfeiçoar estudos em biomecânica e eventualmente usar sua tecnologia na construção de modelos usados em missões de busca e resgate ou em explorações.
Fonte: G1.com
Foto: Divulgação/EPFL